Description
Robots have become complex systems with a high level of autonomy and sometimes challenging requirements for low power consumption. While for large industrial robots the power dissipation of control functions is nothing of priority, battery powered autonomous robots require low power electronics. In addition, safety requirements are to be considered for e.g. collaborative robots that closely interact with human beings. FPGAs with programmable logic and on-chip hard-IP or soft-core processors can serve as excellent generic platforms throughout robotic systems.
Methodology
While most robots have an architecture that foresees a central controller, many robot architectures also employ local decentralized controllers, e.g. for DC motor control, sensor signal capturing or preprocessing. Microcontrollers may be suitable, but FPGA-based SoCs with their programmable logic and parallel processors likely offer more flexibility in terms of higher-speed GPIO handling, realization of inter-node communication protocols and segregation for functional safety. The ability to partition necessary functions between software and programmable logic and to wide prevent the risk of a programmable resource bottlenecks led several of our customers to the application of a single FPGA/SoC device as general platform for all nodes. Of course, choosing a single device as generic platform also provides room to negotiate better prices due to higher volumes.
One suitable option in robotics machinery to apply as safety standard for engineering development is ISO 13849. It introduces the notion of Performance Levels (PL) to cover different classes of risks.
PLC2 has contributed to multiple functional safety related developments for different nodes used in collaborative robots. The control nodes each had very different requirements, still they all employed specialized communications over black channels, a certain level of redundancy and monitoring functions.
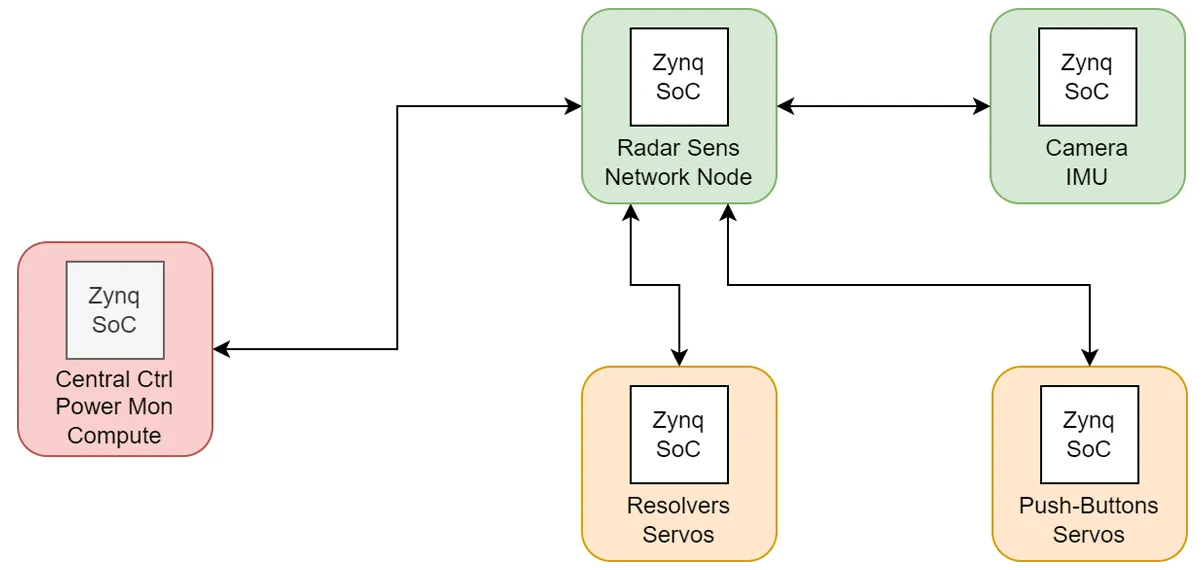
Same flexible SoC with programmable logic used for multiple nodes in robot
Some technologies and methodologies occurred multiple times, such as rotary encoders and conversion between cartesian and polar coordinates for rotary encoders / resolvers, the usage of inertial sensors or measurement units (IMUs) for platform attitudes, and the independent evaluation of synthesis, implementation, timing, CDC reports and power estimations as well as application of Isolation Design Flow (IDF) and formulation of justifications for remaining warning messages to further assure safe design.
Conclusion
PLC2 has contributed to multiple functional safety related developments for different nodes used in collaborative robots in developments according to ISO 13849. Many of our customers appreciate the independent evaluation of synthesis, implementation, timing, CDC reports, and the formulation of justifications where appropriate.